Projet Bras robotique et tri intelligent



Contexte du projet et problématique
Le secteur industriel et logistique connaît une transformation importante vers l’automatisation afin de réduire les erreurs humaines. C’est dans ce contexte qu’est né le projet du bras robotique et du tri intelligent, comme modèle réduit simulant les systèmes industriels.
La problématique traitée par le projet est la suivante : comment trier et classer automatiquement les objets selon leurs couleurs avec précision, afin d’économiser l’effort humain et de garantir une grande exactitude dans le tri des matériaux, comme dans les lignes de production avancées.
Composants techniques et conception d’ingénierie
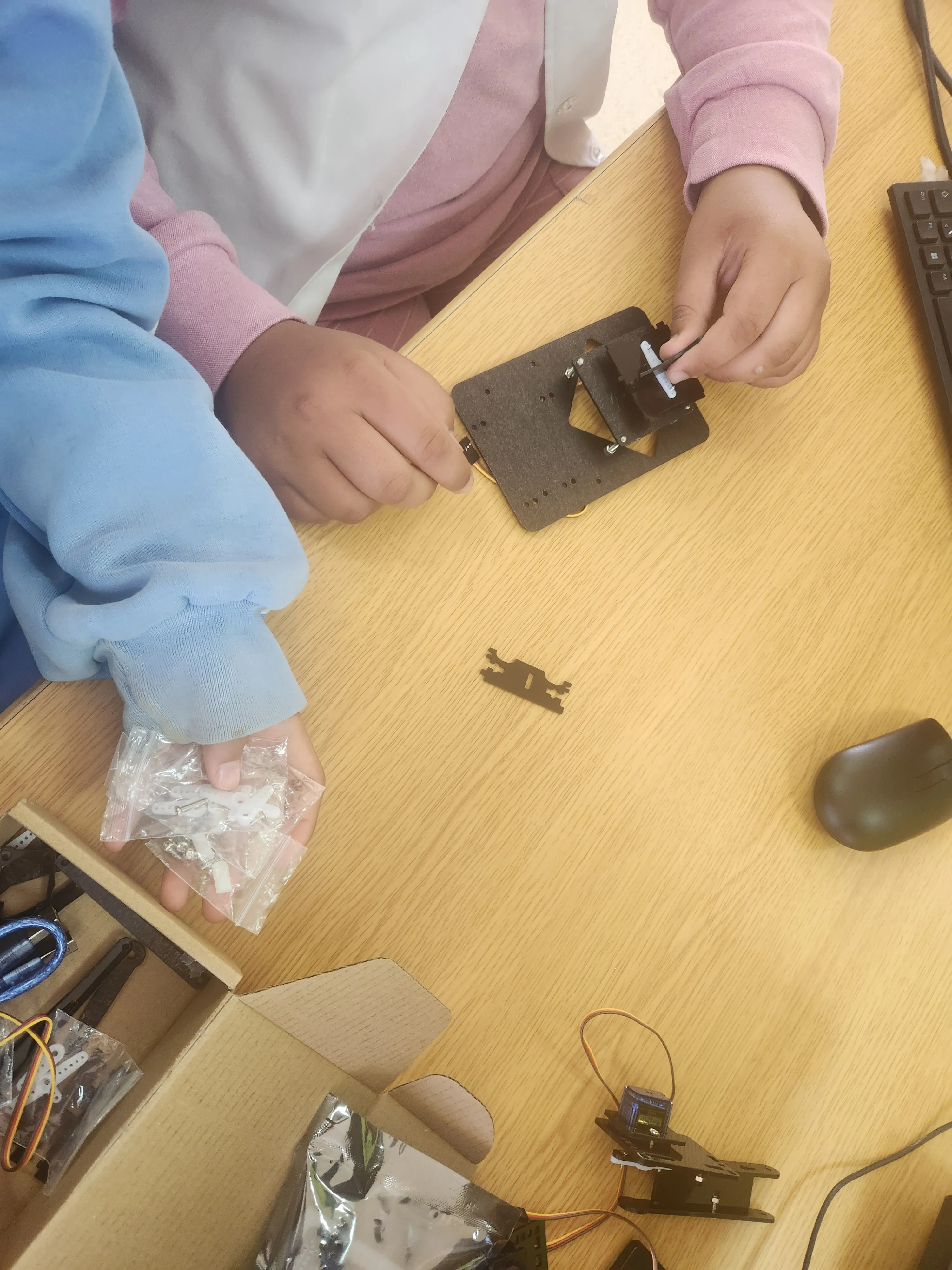
Ce projet a été réalisé grâce à une intégration mécanique et logicielle précise. Il se compose de deux parties principales :
- Plateforme rotative : support mobile sur lequel les objets colorés tournent pour passer de façon organisée devant le système de détection.
- Système de détection : capteur de couleurs précis qui lit et identifie la couleur de chaque objet passant devant lui.
- Bras robotique et servomoteurs : dès que la couleur est identifiée, le bras robotique se déplace avec précision pour saisir l’objet et le déposer à l’emplacement prévu et programmé pour cette couleur.
Réalisation et mode de fonctionnement
Le système fonctionne selon une séquence programmable automatique :
- Rotation et inspection : la plateforme fait avancer les objets colorés vers le capteur de couleur.
- Reconnaissance : le capteur lit précisément la couleur de l’objet et envoie un signal à l’unité de contrôle.
- Saisie et orientation : à partir de la couleur reconnue, les articulations du bras robotique se déplacent pour saisir l’objet et le trier vers l’angle ou le bac qui lui est réservé.
Lien avec les Objectifs de Développement Durable
Ce projet contribue aux Objectifs de Développement Durable, notamment :
- Industrie et innovation (Objectif 9) : renforcer la fabrication durable et encourager l’innovation technologique par la conception de mécanismes intelligents.
- Consommation et production responsables (Objectif 12) : le principe de ce système peut être appliqué au tri précis des matériaux, ce qui soutient des opérations de recyclage organisées.
Équipe de travail et répartition des missions
Les missions ont été réparties efficacement pour garantir la cohérence entre la plateforme et le bras :
- Ingénierie du bras robotique : assurée par l’élève Hiba Troukouti, qui s’est concentrée sur la programmation des mouvements des articulations du bras afin de saisir les objets et de les déposer au bon emplacement selon chaque couleur.
- Ingénierie de la plateforme rotative et de la détection : assurée par l’élève Khadija El Kherbaoui, qui s’est concentrée sur la conception de la plateforme rotative et la programmation du capteur de couleur pour assurer une lecture précise et une synchronisation parfaite avec le mouvement du bras.
Jeunes ingénieurs participant à ce projet

Hiba Taroukouti
Ingénieure du Bras Robotique et Vision

Khadija Kharbaoui
Ingénieure de la Plateforme Tournante et de l'Attention