Robotic Arm and Smart Sorting Project



Project Context and Problem Statement
The industrial and logistics sectors are moving strongly toward automation in order to reduce human errors. From this idea came the robotic arm and smart sorting project, a small-scale model that simulates industrial systems.
The problem addressed by the project is how to automatically and accurately sort objects according to their colors, saving effort and ensuring high precision in material sorting, similar to what happens in advanced production lines.
Technical Components and Engineering Design
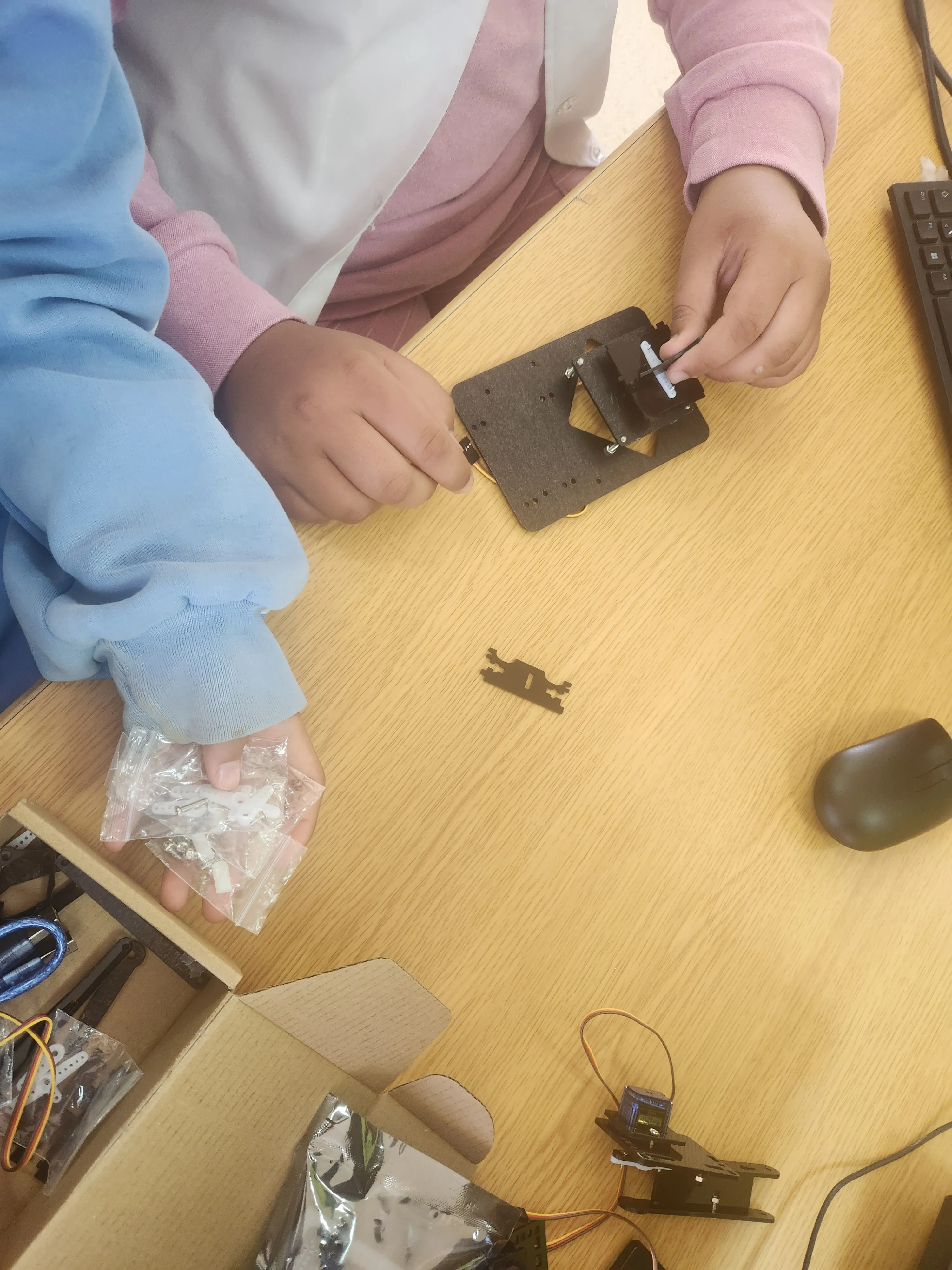
The project was built through careful mechanical and software integration and consists of two main parts:
- Rotating platform: a moving platform on which colored objects rotate to pass regularly in front of the sensing system.
- Sensing system: an accurate color sensor that reads and identifies the color of each object passing in front of it.
- Robotic arm and servo motors: once the color is identified, the robotic arm moves precisely to pick up the object and place it in the location programmed for that specific color.
Implementation and Methodology
The system works according to an automatic programmed sequence:
- Rotation and inspection: the platform rotates the colored objects toward the color sensor.
- Recognition: the sensor reads the object color accurately and sends a signal to the control unit.
- Picking and directing: based on the recognized color, the robotic arm joints move to pick up the object and sort it into its assigned corner or container.
Connection to the Sustainable Development Goals
This project contributes to the Sustainable Development Goals, especially:
- Industry and innovation (Goal 9): strengthening sustainable manufacturing and encouraging technological innovation through smart mechanisms.
- Responsible consumption and production (Goal 12): the logic of this system can be applied to accurate material sorting, supporting organized recycling operations.
Team and Task Distribution
Tasks were distributed effectively to ensure that the platform and arm work together properly:
- Robotic arm engineering: handled by Hiba Troukouti, who focused on programming the movement of the robotic arm joints to pick up objects and place them correctly according to each color.
- Rotating platform and sensing engineering: handled by Khadija El Kherbaoui, who focused on designing the rotating platform and programming the color sensor to ensure accurate reading and perfect synchronization with the arm movement.
Young engineers involved in this project

Hiba Taroukouti
Robotic Arm and Vision Engineer

Khadija Kharbaoui
Rotating Platform and Attention Engineer